Slope of a curve
Categories: differentiation calculus
Differentiation is a mathematical method for finding the slope of a curve at any point. In this article, we will look at the slope of a straight line, and see how this concept can be applied to a curve.
We will also look at some of the techniques that can be used to differentiate many well-known mathematical functions and combinations of functions.
Slope of a straight line
We can find the slope of a straight line by looking at any two points on the line A and B:
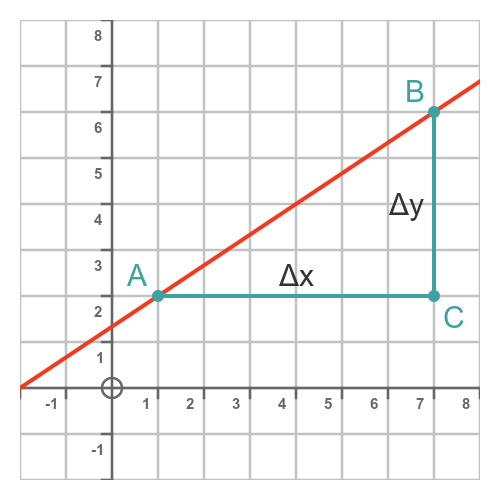
Here Δx is the change in x between points A and B (ie the length AC). Δy is the change in x between points A and B (ie the length CB). The slope is defined as:
In this case AC is 6 units and CB is 4 units so the slope is:
The slope of a straight line is sometimes called its gradient. These two terms mean the same thing.
The slope represents the rate of change of y with respect to x. This tells us how much y changes by when x increases by 1. In this example that slope is positive 2/3, so y increases by 2/3 when x increases by 1.
Slope of a straight line examples
Here are some examples showing the slope of various straight lines:
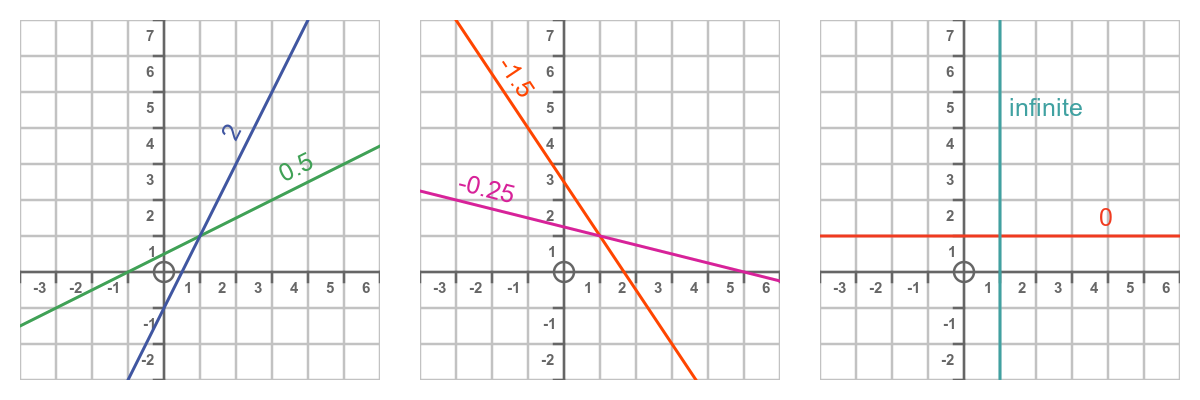
The left-hand graph shows two lines with positive slopes. For these lines, y increases as x increases, so the line slopes upwards from left to right. The greater the slope, the steeper the line, so a slope of 2 is steeper than a slope of 0.5.
The middle graph shows two lines with negative slopes. For these lines, y decreases as x increases, so the line slopes downwards from left to right. The greater the magnitude of the slope, the steeper the line, so a slope of -1.5 is steeper than a slope of -0.25.
The right-hand graph shows two special cases. When the slope is zero, the y value doesn't change at all as x changes, so the line is horizontal. The other special case is a vertical line. This has an infinite slope. This means that the x value is always the same for any y value.
Slope of curve
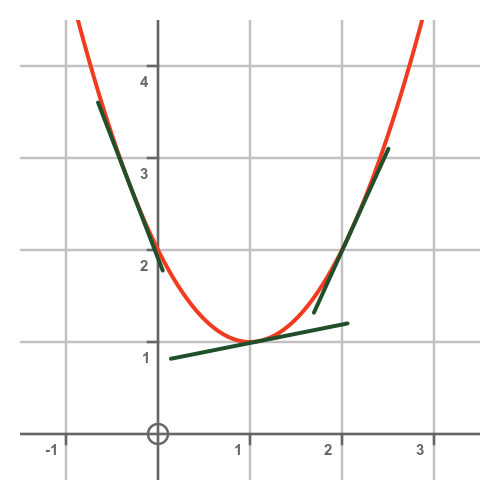
Here is a quadratic curve:
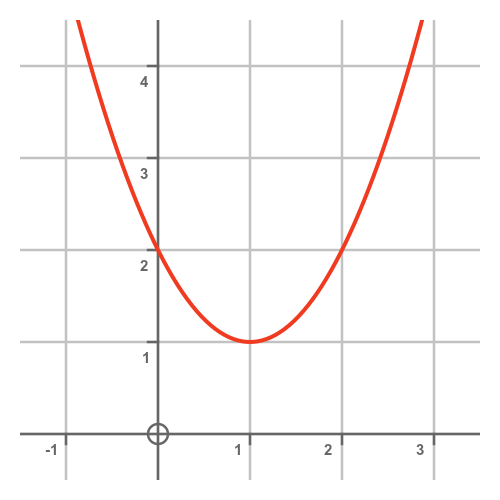
It uses the following function:
How do we find the slope of the curve? Well, the first thing to notice is that the slope of the curve is different at different points on the curve. So let's start by choosing a particular point on the curve. We will choose the point where x = 2.
We find the slope by drawing the tangent to the curve at that point. A tangent is a line that just touches the curve without crossing it:
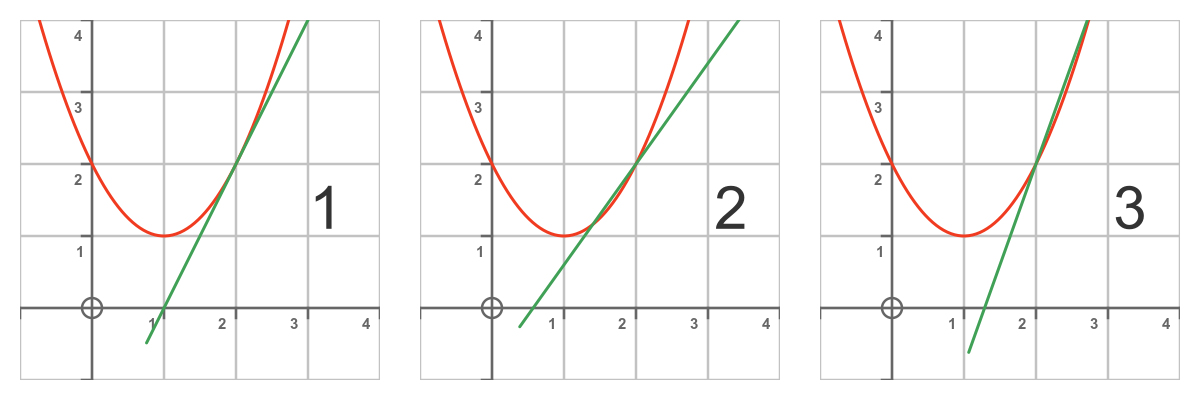
Graph 1 shows the tangent to the curve at x = 2. Graph 2 shows a line that has a slightly smaller gradient. Instead of just touching the curve, the line crosses the curve. Graph 3 shows a line that has a slightly larger gradient. This line also crosses the curve, in the opposite direction.
The tangent is the only line that touches the curve without crossing it. The slope of the tangent is equal to the slope of the curve at that exact point.
If we draw the tangent at other points on the curve, we can see that the slope of the curve is different at different places along the curve.
Calculating the slope
We don't need to draw a tangent and try to measure its slope. For many curves, we can calculate the slope at any point.
Since the slope is different for different values of x, the slope can be expressed as a function of x.
For example, for the curve above with this formula:
The slope as a function of x is:
We will see how to calculate this in a later article. But for now, we can see from the formula that the slope is 0 when x is 1 (the bottom of the U shape). The slope is positive if x > 1 and negative if x < 1. This corresponds to the shape of the graph.
We use the notation y' (y prime) to indicate the slope of y. The process of calculating the slope as a function of x is called differentiation. The resulting function, y', is called the first derivative of y.
Uses of differentiation
Differentiation has many practical uses. For example:
- In mechanics and physics, it can be used to model rates of change of variables in a system. For example, acceleration is the first derivative of velocity.
- It can be used to find local maximum and minimum values of a function because the first derivative of a function is 0 where the curve reverses direction (for example when x = 1 in the case of the quadratic curve above).
- It is often used to analyse and model mathematical functions.
- The inverse process, integration, can be used to calculate areas and lengths.
Differentiating functions
We know how to differentiate many different functions, including powers, polynomials, exponentials, logarithms, trigonometry functions, and hyperbolic functions.
In many cases the derivatives of these functions have been proved from first principles - we will see how to do that for several functions in later articles.
There are also several powerful rules we can often apply to find other derivatives, for example:
- If we know the derivative of f(x) we can find the derivative of the inverse of f(x).
- If we know the derivatives of f(x) and g(x) we can find the derivatives of the product and quotient of the two functions.
- If we know the derivatives of f(x) and g(x) we can find the derivative f(g(x)).
Related articles
- Differentiation from first principles - x²
- Second derivative and sketching curves
- Differentiation - the product rule
- Differentiation - the quotient rule
- Differentiation - the chain rule
- Differentiation - the chain rule (proof)
- Differentiation - the reciprocal rule
- Differentiation - derivative of an inverse function
- Finding the normal to a curve
- Differentiation from first principles - a to the power x
- Derivative of ln x
- Derivative of sine, geometric proof
- Derivative of tangent
- Differentiating the inverse trig functions
- Differentiation - L'Hôpital's rule
- Limits that fail L'Hôpital's rule
Join the GraphicMaths Newsletter
Sign up using this form to receive an email when new content is added to the graphpicmaths or pythoninformer websites:
Popular tags
adder adjacency matrix alu and gate angle answers area argand diagram binary maths cardioid cartesian equation chain rule chord circle cofactor combinations complex modulus complex numbers complex polygon complex power complex root cosh cosine cosine rule countable cpu cube decagon demorgans law derivative determinant diagonal differential equation directrix dodecagon e eigenvalue eigenvector einstein ellipse equilateral triangle erf function euclid euler eulers formula eulers identity exercises exponent exponential exterior angle first principles flip-flop focus gabriels horn galileo gamma function gaussian distribution gradient graph hendecagon heptagon heron hexagon hilbert horizontal hyperbola hyperbolic function hyperbolic functions infinity integration integration by parts integration by substitution interior angle inverse function inverse hyperbolic function inverse matrix irrational irrational number irregular polygon isomorphic graph isosceles trapezium isosceles triangle kite koch curve l system lhopitals rule limit line integral locus logarithm maclaurin series major axis matrix matrix algebra mean minor axis n choose r nand gate net newton raphson method nonagon nor gate normal normal distribution not gate octagon or gate parabola parallelogram parametric equation pentagon perimeter permutation matrix permutations pi pi function polar coordinates polynomial power probability probability distribution product rule proof pythagoras proof pythagorean triple quadrilateral questions quotient rule radians radius rectangle regular polygon rhombus root sech segment set set-reset flip-flop simpsons rule sine sine rule sinh slope sloping lines solving equations solving triangles special relativity speed of light square square root squeeze theorem standard curves standard deviation star polygon statistics straight line graphs surface of revolution symmetry tangent tanh transformation transformations translation trapezium triangle turtle graphics uncountable variance vertical volume volume of revolution xnor gate xor gate
