Polar curve constant theta
Categories: polar coordinates
Here is a polar function of constant $\theta$.
$$\theta = 1$$
This function describes a curve where $\theta$ is constant for any value of $r$. In this case the angle is always 1 radian. The curve is the locus all points that are any distance $r$ from the origin in the direction of $\theta$. The curve in a half line, like this:
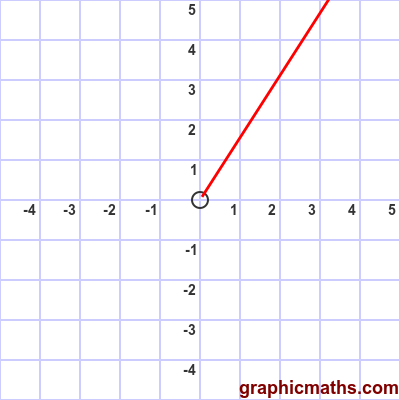
Notice that the curve is a half line, because in polar coordinates, $r$ cannot be negative.
This animation shows how the curve is plotted as $r$ increases from 0:
Varying the angle
In general the function:
$$\theta = a$$
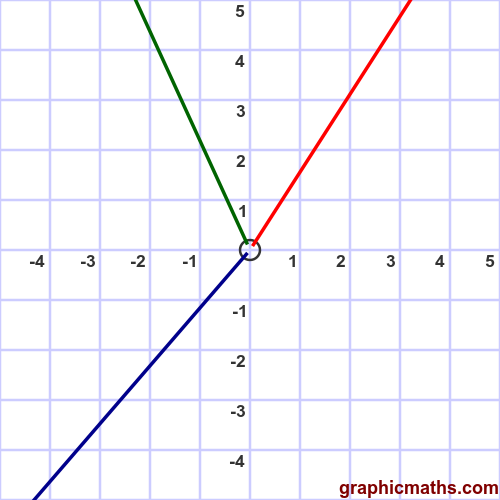
where $a$ is a constant between 0 and $2\pi$, describes a half line at an angle $a$, starring at the origin.
Here are the lines created for $n = 1$ (red), $n = 2$ (green), and $n = 4$ (blue):
Cartesian equation
We can convert the polar equation into a Cartesian equation using the identity:
$$\tan{\theta} = \frac {y}{x}$$
Rearranging this equation gives:
$$y = x \tan{\theta}$$
which is the Cartesian equation for a straight line of gradient $\tan \theta$, passing through the origin. However, the equation in only valid for the quadrant in which $r$ would be positive.
Related articles
Join the GraphicMaths Newsletter
Sign up using this form to receive an email when new content is added to the graphpicmaths or pythoninformer websites:
Popular tags
adder adjacency matrix alu and gate angle answers area argand diagram binary maths cardioid cartesian equation chain rule chord circle cofactor combinations complex modulus complex numbers complex polygon complex power complex root cosh cosine cosine rule countable cpu cube decagon demorgans law derivative determinant diagonal differential equation directrix dodecagon e eigenvalue eigenvector einstein ellipse equilateral triangle erf function euclid euler eulers formula eulers identity exercises exponent exponential exterior angle first principles flip-flop focus gabriels horn galileo gamma function gaussian distribution gradient graph hendecagon heptagon heron hexagon hilbert horizontal hyperbola hyperbolic function hyperbolic functions infinity integration integration by parts integration by substitution interior angle inverse function inverse hyperbolic function inverse matrix irrational irrational number irregular polygon isomorphic graph isosceles trapezium isosceles triangle kite koch curve l system lhopitals rule limit line integral locus logarithm maclaurin series major axis matrix matrix algebra mean minor axis n choose r nand gate net newton raphson method nonagon nor gate normal normal distribution not gate octagon or gate parabola parallelogram parametric equation pentagon perimeter permutation matrix permutations pi pi function polar coordinates polynomial power probability probability distribution product rule proof pythagoras proof quadrilateral questions quotient rule radians radius rectangle regular polygon rhombus root sech segment set set-reset flip-flop simpsons rule sine sine rule sinh slope sloping lines solving equations solving triangles special relativity speed of light square square root squeeze theorem standard curves standard deviation star polygon statistics straight line graphs surface of revolution symmetry tangent tanh transformation transformations translation trapezium triangle turtle graphics uncountable variance vertical volume volume of revolution xnor gate xor gate
